Home
Services
Resources
Blog
URDF Viewer
Projects
Team
Contact
Get In Touch
Home
Services
Blog
Projects
Team
Contact
Get In Touch
Blog
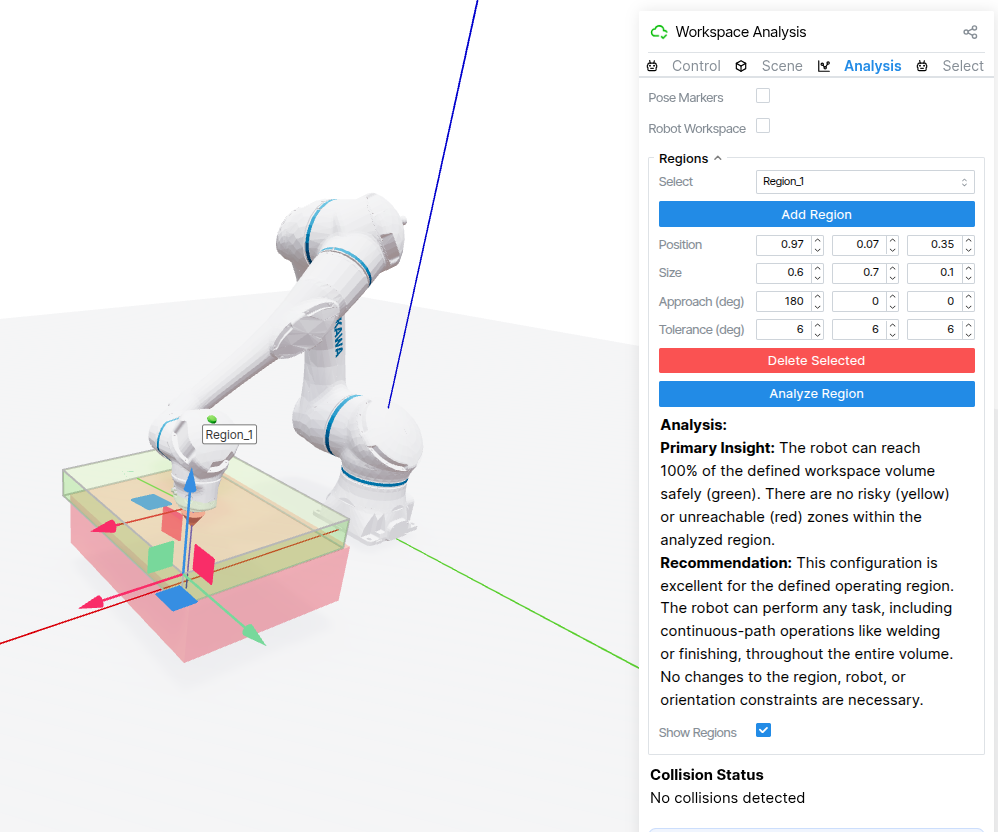
URDF Viewer: A robotic workcell analysis and visualization tool
February 5, 2026
Read time: 4 mins
Robot Simulation Software: A 2026 Perspective
January 22, 2026
Read time: 7 mins
Why Robot Palletizing Software Requires More Than Basic Automation
January 14, 2026
5 mins
2025 at Black Coffee Robotics, A Year in Review
January 2, 2026
Read time: 4 mins
Perception in Robotics: From Geometry to Generative AI
October 28, 2025
5 mins
An open source simulated arm for ROS2, Gazebo and Isaac Sim
July 8, 2025
Read time: 4 mins
What I Look for When Hiring Robotics Engineers (From a Startup Founder)
May 6, 2025
Read time: 3 mins
Vision-Language-Action (VLA) Models: LLMs for robots
April 17, 2025
5 min
ROS 1 to ROS 2 Migration: A Comprehensive Guide
January 21, 2025
Read time: 4 mins
NVIDIA Isaac Sim: Photorealistic Rendering for Next-Gen Robot Development
November 6, 2024
Read time: 4 mins
Vector Pursuit v/s Pure Pursuit ROS2 Controller Plugins
August 13, 2024
Read time: 5 mins
cuRobo (Nvidia) and ROS2 for Motion Planning
July 25, 2024
Read time: 5 mins
ROS2 Moveit Servo: A Tool for Robot Teleoperation and Data Collection
March 12, 2024
Read time: 5 mins
Unit Tests for Robotics Software : Quality over Quantity
February 6, 2024
Read time: 5 mins
Gazebo Simulator : 5 Ways to Speedup Simulations
July 22, 2023
Read time: 7 mins
Webots with ROS : Simulation Overview
July 17, 2023
Read time 4 mins
Gazebo simulator : Migration from Classic to Ignition with ROS 2
July 17, 2023
Read time 4 mins
Gazebo Actors : ROS2 plugin for human animations
April 7, 2023
Read time 4 mins
How to become a robotics engineer
April 6, 2023
Read time 5 mins
How to develop a robot? : Pitfalls you need to know
March 14, 2023
Read time 5 mins
How to develop a robot? : 4 challenges you might face
March 14, 2023
Read time 4 mins
Unity and ROS : Keeping it real
March 5, 2023
Read time 4 mins
Localization for Autonomous Warehouse Robots
March 5, 2023
Read time 6 mins
ROS1 robots in a ROS2 world
March 5, 2023
Read time 3 mins
Robotics software for autonomous robots : Beyond algorithms
March 5, 2023
Read time 5 mins
Our DevOps pipeline for a heterogeneous fleet of autonomous robots
March 5, 2023
Read time 4 mins
GPS based Localization for Self-Driving Robots
March 5, 2023
Read time 6 mins
Gazebo simulator : Projection of Occupancy Maps
March 5, 2023
Read time 5 mins
ROS and ROS2 Navigation Stacks : A performance review
March 1, 2023
Read time 7 mins
ROS : Why What and How.
February 23, 2023
Read time 5 mins
ROS : Core concepts
February 23, 2023
Read time 7 mins
Want to reduce costs and time to market for your autonomous robots?
Get In Touch


.png)








.jpeg)



















.svg)



.webp)